
Введение в математическое программирование - ответы
Количество вопросов - 261
Пусть функция F(x) вогнута (выпукла), и ее первая производная монотонна. Известно, что производная F'(x) в окрестности x' меняет знак с положительного на отрицательный, т.е. F'(x) является убывающей функцией, и F''(x) < 0. Следовательно, в точке x' функция F(x):

Если среди базисных компонентов псевдоплана x нет отрицательных, то псевдоплан x={xi0} является:
Какие ограничения удовлетворяются в комбинированных методах в процессе оптимизации?
Одно из свойств метода наискорейшего спуска гласит о том, что если направление градиента является направлением наискорейшего возрастания функции, то противоположное направление:
Если функции f1(x), f2(x),...,fp(x) выпуклы (вогнуты) на множестве Ri и выполняется условие ki ≥ 0, i = 1,2,...,p, то функция g(x) = Σkifi(x), i=1,...,p:
С помощью каких операций перемещается симплекс в методе Спендли, Хекста и Химсворта?
Можно ли при наличии ограничения использовать критерии оптимальности безусловной оптимизации?
Пусть известен некоторый сопряженный базис  , которому соответствует псевдоплан x, базисные компоненты которого xi = xi0≥0 для всех i є Iδ. При этом
, которому соответствует псевдоплан x, базисные компоненты которого xi = xi0≥0 для всех i є Iδ. При этом  Тогда:
Тогда:
Двойственный симплекс – метод, в отличии от прямого, не требует:
Если x0 и y0 – оптимальные решения пары двойственных задач, и кроме того, cTx0=bTy0, то:
Если в двойственной задаче допустимый вектор x0 является оптимальным и при этом выполняется условие cTx0=bTy0, то:
Чему будет равна функция Розенброка f(x1,x2), если известно что х1=1, а х2=2?
К какой группе относиться метод штрафных функций?
Для решения каких задач чаще используется "метод сеток"?
Согласно методу Ньютона, точка экстремума равна:
Пусть функция f(x) определена на непустом и выпуклом множестве R. Функция f(x) квазивыпукла, если для любых x1, x2 є R и λ є [0;1] выполняется неравенство:
Пусть ограничения задачи линейного программирования записаны в виде: A1x1+A2x2+...+Anxn+An+1xn+1+...+An+mxn+m=A0, где А1,...,Аm – множество линейно независимых векторов. Согласно симплекс – метода, базисное решение  определяется уравнением:
определяется уравнением:
Что является недостатком метода Коши?
Пусть требуется изготовить 120 деталей. Их можно изготовить двумя технологическими способами: 1 способ: х1+х12, 2 способ: 2х2+2х22. Затраты связаны функциональной зависимостью. Сколько изделий может быть изготовлено каждым способом?
Пусть задана задача нелинейного программирования: минимизировать f(x1,...,xn) при условиях h1(x1,...,xn) = 0;h2(x1,...,xn) = 0;...............hm(x1,...,xn) = 0.
Допустим, что существует такая точка x*, в которой достигается относительный экстремум данной задачи. Если ранг матрицы I = [δhj(x)/δxj], i = 1,...,m; j = 1,...,n в точке x* равен m, то существуют m чисел λ1,...,λn, не все из которых равны нулю одновременно, и при которых:
Присоединенная функция построена в виде так называемого барьера: . При этом ограничения в задаче имеют вид:
. При этом ограничения в задаче имеют вид:
Пусть f(x) и все gi(x) выпуклы и все функции gi(x) удовлетворяют условию регулярности Слейтера. Вектор x* решением задачи нелинейного программирования: минимизировать f(x) при условиях gi(x) ≤ 0, i = 1,...,m тогда и только тогда, когда существует такой вектор Δ* ≥ 0, для которого выполняются условия:
Функция f(x) достигает локального максимума в точке  , если для всех точек x, лежащих в малой окрестности точки
, если для всех точек x, лежащих в малой окрестности точки ![[x^0_1, x^0_2 ,\ldots, x^0_n ]](https://intuit.ru//sites/default/files/tex_cache/67a9b05a65fc5309eaf69b117af88149.png) имеет место неравенство:
имеет место неравенство:
Пусть функция f(x) является строго квазивыпуклой и выполняется неравенство f(λx1 + (1–λ)x1) < max{f(x1),f(x2)}. При этом для всех действительных x1, x2 выполняется условие:
Если задача линейного программирования содержит n переменных и m ограничений, записанных в форме неравенств (n > m), не считая ограничений неотрицательности переменных xi ≥ 0, то в оптимальное решение входит:
Задача линейного программирования имеет вид: максимизировать Σсixi, i=1,...,n при условиях A1x1+A2x2+...+Anxn≤b; Данная форма записи является:
Размерность дна оврага определяется числом малых собственных значений матрицы
Пусть некоторому сопряженному базису соответствует псевдоплан x. Очевидно, Aj=ΣAixij; A0=ΣAixi, i є Iδ. Известно, что среди базисных компонентов xi имеются отрицательные, причем для некоторого i: xi < 0, а все xij ≥ 0, j=1,...,n. Это значит, что:
Рассмотрим задачу нелинейного программирования: минимизировать f(x) при  . Для входящего вектора справедливы следующие условия:
. Для входящего вектора справедливы следующие условия:  или
или  для всех x є S. Тогда множество неотрицательных скаляров {λi} ≥ 0, для которых справедливо соотношение:
для всех x є S. Тогда множество неотрицательных скаляров {λi} ≥ 0, для которых справедливо соотношение:
Если для некоторой функции f(x) в некоторой окрестности точки  знаки определителей чередуются, т.е. справедливо условие
знаки определителей чередуются, т.е. справедливо условие , то дифференцируемая функция f(x):
, то дифференцируемая функция f(x):
Запись задачи линейного программирования в виде представляет собой:
представляет собой:
Выберите из представленного ряда записей задач линейного программирования запись задачи в канонической форме:
Запись задачи линейного программирования в виде
Задачу линейного программирования можно сформулировать:
Задачу линейного программирования в канонической форме можно сформулировать:
Пусть задача линейного программирования сформулирована следующим образом: максимизировать cTx при ограничениях Аx≤b; x≥0;. Данная форма записи является:
Задачу линейного программирования в векторной форме можно сформулировать следующим образом:
Пусть задача линейного программирования имеет вид: максимизировать Σсixi, i=1,...,n при условиях a11x1 + a12x2+...+a1nxn ≤ b1 a21x1 + a22x2+...+a2nxn ≤ b2 (1) ......................... am1x1 + am2x2+...+amnxn ≤ bn, x1≥0,x1≥0,...,xn≥0.
Тогда множество R(x) является допустимым множеством решений данной задачи, если оно удовлетворяет условиям:
Уравнение  определяет базисное решение согласно симплекс – методу, если ограничения задачи линейного программирования имеют вид:
определяет базисное решение согласно симплекс – методу, если ограничения задачи линейного программирования имеют вид:
Пусть уравнение определяет базисное решение , которое является допустимым, т.е.  . При этом справедливо равенство: A1x1r+A2x2r+...+Amxmr = Ar. Это значит, что:
. При этом справедливо равенство: A1x1r+A2x2r+...+Amxmr = Ar. Это значит, что:
Обозначим решение уравнения A1x1+A2x2+...+Amxm+Arxr = А0как  . Связь нового решения
. Связь нового решения  со старым базисным решением выражается соотношениями
со старым базисным решением выражается соотношениями  . Тогда уравнение, определяющее старое базисное решение , имеет вид:
. Тогда уравнение, определяющее старое базисное решение , имеет вид:
Пусть уравнение A1x1+A2x2+...+Amxm+Arxr = А0имеет решение . Данное решение:
Пусть новое решение уравнения A1x1+A2x2+...+Amxm+Arxr = А0 имеет вид , и при этом является допустимым. Выведем одну переменную xi из базисного решения, а соответствующий вектор из базиса. Тогда новое базисное решение имеет вид:
Если для табличного симплекс – метода оценки для всех небазисных переменных равны Δj=a0j=-cj, а соответствующее значение целевой функции a00 = Σcixi = 0, i є I;, то в качестве начального базиса выбран базис:
Если существует такой небазисный вектор, для которого оценка отрицательна, и целевая функция задачи в области допустимых решений неограниченна, то все элементы этого столбца:
Если в оптимальное решение задачи линейного программирования входит не более чем m ненулевых компонент вектора x, все переменные xi ≥ 0 и все ограничения записаны в форме неравенств, то задача линейного программирования содержит:
Выберите верное утверждение: если Ax0≤b и ATy0≥c, то:
Если x0 и y0 – допустимые решения прямой и двойственной задач, и кроме того, cTx0=bTy0, то:
Если в оптимальном решении некоторой задачи i–е ограничение выполняется как строгое неравенство и оптимальное значение соответствующей двойственной переменной равно нулю, то данная задача является:
Если в оптимальном решении двойственной задачи ограничение j выполняется как строгое неравенство, то оптимальное решение соответствующей переменной прямой задачи:
Прямая и двойственная задачи имеют оптимальные решения тогда и только тогда, когда:
Если в двойственной задаче имеется такое допустимое решение y0, чтоcTx0=bTy0, то допустимый вектор x0:
Если прямая задача линейного программирования имеет вид: максимизировать Σcjxj, j=1,...,n при условиях Σaijxj≤bi, i=1,...,m1<m; Σaijxj=bi, i=m1+1,m1+2,...,m; xj≥0; j=1,...,n1<n. Тогда двойственная ей задача имеет вид:
Если x и y – допустимые решения прямой и двойственной задач и при этом они являются оптимальными решениями этих задач, то справедливо соотношение:
В отличии от прямого симплекс – метода, двойственный симплекс – метод:
Если x' и y' – оптимальные решения пары двойственных задач и при этом выполняется равенство Σcjx'j+Σcj(x'j–x'j+n2) = Σbiy'i + Σbi(y'i–y'i+m2), то x' и y':
Пусть двойственная задача линейного программирования имеет вид: минимизировать  при условиях
при условиях  и при этом n ≥ m и ранг матрицы A равен m. Тогда задача, записанная в канонической форме, имеет вид:
и при этом n ≥ m и ранг матрицы A равен m. Тогда задача, записанная в канонической форме, имеет вид:
Пусть некоторое базисное решение y системы линейных уравнений вида  , удовлетворяет ограничениям
, удовлетворяет ограничениям  Тогда вектора матрицы ограничений прямой задачи , составляющие сопряженный базис, являются:
Тогда вектора матрицы ограничений прямой задачи , составляющие сопряженный базис, являются:
Пусть n – мерный вектор x является псевдопланом, для которого выполняются условия: Δj ≥ 0, j=1,...,n;. Тогда справедливы равенства:
Псевдоплан x={xi0}, среди базисных компонентов которого нет отрицательных, является оптимальным решением:
Пусть известен некоторый сопряженный базис , которому соответствует псевдоплан x. При этом псевдоплан x является оптимальным решением и Тогда для базисных компонентов справедливо условие:
Пусть задан некоторый сопряженный базис Ему соответствует псевдоплан x. При этом Aj=ΣAixij; A0=ΣAixi, i є Iδ. Известно, что задача неразрешима. Это значит, что базисные компоненты удовлетворяют условиям:
Функция f(x) достигает локального максимума в точке и при этом имеет место равенство  . Это справедливо:
. Это справедливо:
Множество точек S1(x1,...,xn) функции f(x), удовлетворяющих условию ∂f(x)/∂xj = 0, j=1,...,n называется:
Пусть f(x1,...,xn) дифференцируема в некоторой допустимой области R. Если в некоторой внутренней точке  области R функция достигает относительного максимума, то:
области R функция достигает относительного максимума, то:
Если для всех точек x є R некоторой функции f(x) справедливо неравенство f(x0) ≥ f(x), то в точке x0 функция f(x):
Пусть R – выпуклое множество точек n – мерного пространства. Функция f, определенная на R, называется выпуклой верх, если для любой пары точек x1, x2 є R и произвольного 0 ≤ k ≤ 1 справедливо:
Дифференцируемая функция f(x) строго вогнутая в некоторой окрестности точки , если выполняются следующие условия:
Если некоторая точка x0 функции является стационарной, а сама функция в окрестности точки x0 является строго выпуклой, то в точке x0:
Пусть на некотором множестве Ri функция g(x) = Σkifi(x), i=1,...,p выпукла (вогнута) и выполняется условие ki ≥ 0, i = 1,2,...,p. Тогда на множестве Ri функции f1(x), f2(x),...,fp(x):
Если для всех действительных x1, x2, таких, что f(x1) ≠ f(x2) и λ є (0;1) выполняется неравенство f(λx1 + (1–λ)x1) < max{f(x1),f(x2)}, то функция f(x) является:
Пусть функция f(x) на некотором множестве R является квазивыпуклой, т.е. для любых x1, x2 є R и λ є [0;1] выполняется неравенство f(λx1 + (1–λ)x1) ≤ max{f(x1),f(x2)}.Тогда множество R является:
Пусть f(x) – строго квазивыпуклая функция. Рассмотрим задачу минимизации f(x) при условии, что x є R, где R – непустое выпуклое множество в Е(n). Пусть x' – точка локального минимума рассматриваемой задачи. Тогда x' является:
Пусть задана задача нелинейного программирования: минимизировать f(x1,...,xn) при условиях h1(x1,...,xn) = 0;h2(x1,...,xn) = 0;...............hm(x1,...,xn) = 0.
Пусть в некоторой точке x* ранг матрицы I = [δhj(x)/δxj], i = 1,...,m; j = 1,...,nравен m, и существуют m чисел λ1,...,λn, не все из которых равны нулю одновременно, и при которых Δf(x*) + ΣλiΔhi(x) = 0, i = 1,...,m. Тогда в точке x*:
Пусть функции gi(x), i=1,...,m имеют непрерывные частные производные на некотором открытом множестве Rn, содержащем точку x*. Если для функции f(x) ограничения gi(x) ≤ 0, i=1,...,m удовлетворяют условию регулярности в виде линейной независимости векторов Δgi(x*), и существуют такие неотрицательные множители Лагранжа λ1,...,λm, что Δf(x*) + ΣλiΔgi(x*) = 0;Σλigi(x*) = 0, λi ≥ 0, i = 1,...,m является:
Пара векторов x*, Δ* для которых выполняется условие: для всех Δ ≥ 0, x є Rn L(x*, Δ) ≤ L(x*, Δ*) ≤ L(x, Δ*), называется:
Пусть функция F(x) вогнута (выпукла), т.е. ее первая производная монотонна. Известно, что производная F'(x) в окрестности x' меняет знак с отрицательного на положительный, т.е. F'(x) является возрастающей функцией, и F''(x) > 0. Следовательно, в точке x' функция F(x):
Пусть функция F(x) вогнута (выпукла), следовательно, ее первая производная монотонна. Если в точке x' функция F(x) имеет максимум, то производная F'(x) в окрестности x' меняет знак с положительного на отрицательный, т.е. F'(x) является убывающей функцией, значит:
Пусть функция F(x) вогнута (выпукла), что соответствует монотонности ее первой производной. Если в некоторой точке градиент функции F(x) равен нулю, то функция F(x) в этой точке:
Пусть функция F(x) вогнута (выпукла), и ее первая производная монотонна. Для нахождения экстремума функции F(x) методом Ньютона начальные приближения x выбирают в такой точке интервала [a; b], где знаки функции f(x) и ее кривизны f''(x):
Предположим, что имеется интервал неопределенности (x1; x3) и известно значение f(x2) внутри этого интервала. Положим x2–x1=L и x3–x2=R, причем L > R. Если x4 находится в интервале (x1; x2) и f(x4) < f(x2), то новым интервалом неопределенности будет:
Пусть имеется начальный интервал (a; b). Согласно метода Фибоначчи интервал неопределенности имеет длину Ln = L1/Fn + ξ(Fn–2/Fn). Это справедливо, если:
Дана функция F(x). Известно, что x' доставляет некоторый экстремум функции F(x) на интервале [a; b] с заданной точностью ξ. При этом F1 и F2 – значения функции F(x) в окрестности ±ξ вычисленной точки x=(a+b)/2. Если F1 < F2, т.е. b = x, то:
В каком из методов происходит сравнение значений функции в (n + 1) вершинах симплекса и перемещении симплекса в направлении оптимальной точки с помощью итерационной процедуры?
Чему будет равняться функция в точке образа, если базисная точка b1 = 1, а b2 = 7?
Известно что x0 = 3, xr = 4, xh = 2. Чему будет равен коэффициент отражения α?
Какие значения рекомендуют брать Нелдер и Мид для коэффициентов отражения (α), сжатия (β) и растяжения (γ)?
Под каким углом происходит изменение траектории нахождения оптимальной точки в методе покоординатного спуска?
Чему будет равняться коэффициент растяжения γ, если известно, что x0 = 3, xe = 5, xr = 2?
Чему будет равно общее число сетки, если область G является двумерным кубом, каждую сторону которого при построении сетки мы делим на 10 частей?
Чему будет равна функция Розенброка f(x1,x2), если известно что х1=1, а х2=3?
Метод, при котором происходит движение к минимуму в направлении наиболее быстрого убывания функции, определяемого антиградиентом, носит название:
Известно, что если направление градиента является направлением наискорейшего возрастания функции, то противоположное направление является направлением наискорейшего убывания функции. Это свойство присуще:
От чего поможет избавиться проведение поиска несколько раз, начиная его с разных точек?
Направление градиента является направлением?
Метод Розенброка используется при минимизации овражных функционалов, если овраг
После чего останавливаются расчеты при многоэкстремальными?
Если для всех x1, x2 ∈ X выполняется соотношение f[θx2+(1–θ)x1]≤θf(x2)+(1–θ)f(x1) при 0 < θ < 1, то функция f(x) на выпуклой области X является:
Кривая у = f(х) называется вогнутой в промежутке a<x<b, если она лежит
Чему будет равен условный минимум x, при заданной функции f(x)=(x-2)2→min, без ограничения?
Чему будет равен условный минимум x, при заданной функции f(x)=(x-3)2→min, с ограничением х≥9?
Задана целевая функция Z=20x1+10x2 → max и ряд ограничений 10х1+2х2≤200, 2х1+4х2≤110, 2х1+3х2≤140, х1,х2≥0. Найти решение задачи.
Если вторая производная функции у = f(х) в данном промежутке отрицательна, то кривая...?
Комплексный метод является?
Пусть  . Тогда присоединенная функция построена в виде:
. Тогда присоединенная функция построена в виде:
В случае, если Z = f(x)+P(x), минимум Z будет находиться?
Метод последовательной безусловной оптимизации относиться к...?
При использовании методов внутренней точки текущая точка постоянно находится внутри допустимой области с помощью штрафной функции, которая в этом случае называется?
Методы, использующие штрафные функции, определяются?
Какой метод позволяет найти решение без значительного ухудшения обусловленности задачи?
Как выглядит функция метода штрафных функций?
Какой будет линия профиля при С = 3?
Пусть функции gi(x), i=1,...,m имеют непрерывные частные производные на некотором открытом множестве Rn, содержащем точку x*. Если x* является точкой минимума функции f(x) при ограничениях gi(x) ≤ 0, i=1,...,m, удовлетворяющих условию регулярности в виде линейной независимости векторов Δgi(x*), то существуют такие неотрицательные множители Лагранжа λ1,...,λm, что справедливы соотношения:
Дана функция F(x). Пусть x' доставляет минимум функции F(x) на интервале [a; b] с заданной точностью ξ. Известно, что F1 и F2 – значения функции F(x) в окрестности ±ξ вычисленной точки x=(a+b)/2. При поиске минимума был отброшен отрезок [x; b], т.е. b = x. Это значит, что:
Если линии уровня функции вытянуты в одном направлении и сплющены в другом, то речь идет о ...
n–мерный вектор x, для которого xi=xi0 при i є Iδ, и xj=0 при i ∉ Iδ является псевдопланом тогда и только тогда, когда:
Какой будет линия профиля при С = 2?
Если x и y – допустимые решения прямой и двойственной задач и если при этом Σcjxj = Σbiyi, j=1,...,n; i=1,...,m, то:
При использовании методов внутренней точки текущая точка постоянно находится
Множеством стационарных точек функции f(x) называется множество точек S1(x1,...,xn):
Если x' и y' – допустимые решения пары двойственных задач и при этом они являются оптимальными решениями этих задач, то выполняется условие:
Уравнение определяет базисное решение . Новое решение связано со старым базисным решением соотношениями: Тогда уравнение имеет вид:
Пусть функция F(x) вогнута (выпукла), т.е. ее первая производная монотонна. Если функция F(x) имеет локальный минимум (максимум) в точке x', то в этой точке градиент функции F(x) равен нулю, т.е.:
Если прямая задача линейного программирования имеет вид: максимизировать Σcjxj, j=1,...,n при условиях Σaijxj≤bi, i=1,...,m1<m; Σaijxj=bi, i=m1+1,m1+2,...,m; xj≥0; j=1,...,n1<n. Тогда двойственная ей задача имеет вид: минимизировать Σbiyi. Условия ограничения двойственной задачи имеют вид:
Что в записанном выражении является штрафной функцией: Z = f(x)+P(x)?
Стандартная форма задачи линейного программирования имеет вид:
Метод Коши наиболее эффективный когда линии уровня представляют собой?
Известно что x0 = 6, xr = 2, xh = 4. Чему будет равен коэффициент отражения α?
Если x и y - оптимальные решения прямой и двойственной задач, и при этом выполняется условие Σcjxj = Σbiyi, j=1,...,n; i=1,...,m, то x и y являются:
Чему будет равна функция Розенброка f(x1,x2), если известно что х1=2, а х2=3?
Пусть для некоторой системы, состоящей из m линейно - независимых векторов матрицы ограничений прямой задачи , базисное решение y соответствующей системы линейных уравнений вида , удовлетворяет ограничениям Тогда данная система носит название:
Если существует такой небазисный вектор, для которого оценка отрицательна, а все элементы этого столбца неположительны, то целевая функция задачи в области допустимых решений:
Пусть ограничения в задаче имеют вид чистых неравенств:  . Тогда согласно метода Кэррола присоединенная функция имеет вид:
. Тогда согласно метода Кэррола присоединенная функция имеет вид:
Пусть в некоторой задаче минимизации функции f(x), где x є R и R – непустое выпуклое множество в Е(n), точка x' является одновременно точкой и локального, и глобального минимумов. Тогда функция f(x):
Чему будет равно общее число сетки, если область W является трехмерным кубом, каждую сторону которого при построении сетки мы делим на 5 частей?
Кривая у = f(х) называется выпуклой в промежутке a<x<b, если она лежит ...
Пусть для некоторой выпуклой вверх(вогнутой) функции f, определенной на множестве R справедливо условие: для любых x1, x2 є R и 0 ≤ k ≤ 1 f[kx1+(1–k)x2] ≤ kf(x1)+(1–k)f(x2). Тогда множество R является:
Пусть функция F(x) вогнута (выпукла), и ее первая производная монотонна. Согласно метода Ньютона, начальные приближения x выбирают в такой точке интервала [a; b], где выполняется условие f(x)·f''(x) > 0, т.е. наблюдается совпадение знаков:
Решение методом Ньютона достигается за один шаг, если?
Предположим, что имеется интервал неопределенности (x1; x3) и известно значение f(x2) внутри этого интервала. Положим x2–x1 = L и x3–x2 = R. Если x4 находится в интервале (x1; x2) и новым интервалом неопределенности будет (x1; x2) длиной x2–x1 = L, то в этом случае:
Допустимый вектор x0 оптимальный тогда и только тогда, когда в двойственной задаче имеется такое допустимое решение y0, что:
При использовании комплексного метода, если целевая функция f(x) выпукла и функции gi(x) тоже выпуклы, то задача будет иметь?
Запись задачи линейного программирования в виде представляет собой:
представляет собой:
Выберите из представленного ряда записей задач линейного программирования запись задачи в стандартной форме:
Если задача линейного программирования сформулирована следующим образом: максимизировать  , то условия имеют вид:
, то условия имеют вид:
Пусть задача сформулирована в виде:максимизировать  при условиях
при условиях Данная форма записи является:
Данная форма записи является:
В матричной форме задача линейного программирования записывается следующим образом:
Пусть уравнение определяет базисное решение . Предположим, что это решение допустимо, т.е. . Если Аr не входит в базис, то:
Пусть уравнение  определяет базисное решение .Новое решение базисное решение связано со старым базисным решением соотношениями: . Данное решение будет допустимым, если:
определяет базисное решение .Новое решение базисное решение связано со старым базисным решением соотношениями: . Данное решение будет допустимым, если:
Пусть новое решение уравнения A1x1+A2x2+...+Amxm+Arxr = А0 имеет вид , и при этом выполняется соотношение  , т.е. данное решение является допустимым. Чтобы данное решение являлось базисным, необходимо:
, т.е. данное решение является допустимым. Чтобы данное решение являлось базисным, необходимо:
Если задача линейного программирования содержит n переменных и m ограничений, не считая ограничений неотрицательности переменных xi ≥ 0, и в оптимальное решение входит не более чем m ненулевых компонент вектора x, то выполняется условие:
Пусть дана прямая задача: максимизировать Σcjxj, j=1,...,n при ограничениях Σaijxj≤b, i=1,...,m, xj≥0, j=1,...,n. Если в оптимальном решении данной задачи i–е ограничение выполняется как неравенство, то оптимальное значение соответствующей двойственной переменной:
Если прямая и двойственная задачи имеют допустимые решения, и при этом двойственная задача имеет оптимальное решение, то:
Если x' и y' – допустимые решения пары двойственных задач и при этом выполняется равенство Σcjx'j+Σcj(x'j–x'j+n2) = Σbiy'i + Σbi(y'i–y'i+m2), то x' и y':
Сопряженным базисом называется такая система из m линейно - независимых векторов матрицы ограничений прямой задачи , для которой базисное решение y соответствующей системы линейных уравнений вида , удовлетворяет ограничениям:
Псевдоплан x={xi0} является оптимальным решением прямой задачи, если среди его базисных компонентов:
Пусть некоторому сопряженному базису соответствует псевдоплан x. Среди базисных компонентов xi имеются отрицательные, причем для некоторого i: xi < 0, а все xij ≥ 0, j=1,...,n. Это значит, что задача неразрешима. Следовательно, справедливы соотношения:
Если для всех точек x, лежащих в малой окрестности точки имеет место неравенство , то:
Если функция f(x1,...,xn) в некоторой внутренней точке допустимой области R функция достигает относительного максимума и при этом справедливо равенство ∂f(x0)/∂xj = 0, j=1,...,n, то:
Если для всех точек x є R некоторой функции f(x) справедливо неравенство f(x0) ≥ f(x), то функция f(x):
Пусть R – выпуклое множество точек n – мерного пространства. Функция f, определенная на R, удовлетворяет условиям: для любых x1, x2 є R и 0 ≤ k ≤ 1 f[kx1+(1–k)x2] ≤ kf(x1)+(1–k)f(x2). Тогда функция f называется:
Если для некоторой строго вогнутой функции f(x) в некоторой окрестности точки знаки определителей чередуются, т.е. справедливо условие, то функция f(x):
Если функции f1(x), f2(x),...,fp(x) выпуклы (вогнуты) на множестве Ri, то функция g(x) = Σkifi(x), i=1,...,p также выпукла (вогнута) при условии:
Пусть задача нелинейного программирования задана в виде: минимизировать f(x1,...,xn) при условияхh1(x1,...,xn) = 0;h2(x1,...,xn) = 0;...............hm(x1,...,xn) = 0.
Допустим, что существует такая точка x*, в которой достигается относительный экстремум данной задачи.Известно, что существуют m чисел λ1,...,λn, не все из которых равны нулю одновременно, и при которых Δf(x*) + ΣλiΔhi(x) = 0, i = 1,...,m. Тогда:
Пусть некоторое открытое множество Rn содержит точку x*. Известно, что x* является точкой минимума функции f(x) при ограничениях gi(x) ≤ 0, i=1,...,m, удовлетворяющих условию регулярности в виде линейной независимости векторов Δgi(x*), и существуют такие неотрицательные множители Лагранжа λ1,...,λm, что Δf(x*) + ΣλiΔgi(x*) = 0;Σλigi(x*) = 0, λi ≥ 0, i = 1,...,m. Тогда функции gi(x), i = 1,...,m:
Пара векторов x*, Δ* называется седловой точкой функции Лагранжа L(x,Δ), если при всех Δ ≥ 0, x є Rn выполняется условие:
Пусть f(x) и все gi(x) выпуклы и все функции gi(x) удовлетворяют условию регулярности Слейтера. Задача нелинейного программирования задана следующим образом: минимизировать f(x) при условиях gi(x) ≤ 0, i = 1,...,m. Пусть существует некоторый вектор Δ* ≥ 0, такой, что L(x*,Δ) ≤ L(x*,Δ*) ≤ L(x,Δ*) и  . Тогда вектор Δ*:
. Тогда вектор Δ*:
При помощи какого из нижеприведенных соотношений осуществляется нахождение экстремума функции F(x) методом Ньютона:
Пусть функция F(x) вогнута (выпукла), и ее первая производная монотонна. Согласно метода Ньютона, начальные приближения x выбирают в такой точке интервала [a; b], где знаки функции f(x) и ее кривизны f''(x) совпадают, т.е. выполняется условие:
Чему будет равняться функция в точке образа, если базисная точка b1 = 4, а b2 = 8?
Известно что x0 = 5, xr = 8, xh = 6. Чему будет равен коэффициент отражения α?
Если при проверке сходимости а < σ, то это означает?
Чему будет равняться коэффициент растяжения γ, если известно, что x0 = 4, xe = 1, xr = 3?
Чему будет равно общее число сетки, если область W является трехмерным кубом, каждую сторону которого при построении сетки мы делим на 5 частей?
Метод градиентного спуска предполагает движение:
Функция f(x) является выпуклой на выпуклой области X, если для всех x1, x2 ∈ X выполняется соотношение:
Чему будет равен условный минимум x, при заданной функции f(x)=(x-4)2→min, без ограничения?
Задана целевая функция Z=25x1+20x2 → max и ряд ограничений 8х1+3х2≤400, 3х1+2х2≤80, 5х1+7х2≤200, х1,х2≥0. Найти решение задачи.
Как называются промежутки, в которых график функции обращен выпуклостью вверх или вниз?
Параметрические методы подразделяются на...?
Метод штрафных функций генерирует последовательность недопустимых решений, которая приближается к оптимальному решению?
Какие существуют типы штрафов?
Как называется множество точек, с координатами [x1,x2] для которых целевая функция F(X) имеет постоянное значение?
Если в оптимальном решении некоторой задачи ограничение j выполняется как строгое неравенство и при этом оптимальное значение переменной прямой задачи равно нулю, то данная задача является:
Если прямая и двойственная задачи имеют допустимые решения, то:
Чему будет равняться коэффициент растяжения γ, если известно, что x0 = 5, xe = 3, xr = 6?
Пусть имеется начальный интервал (a; b), который имеет длину L = b – a. Согласно метода Фибоначчи:
Выберите из представленного ряда записей задач линейного программирования запись задачи в общей форме:
Дана функция F(x). Пусть x' доставляет минимум функции F(x) на интервале [a; b] с заданной точностью ξ. Известно, что F1 и F2 - значения функции F(x) в окрестности ±ξ вычисленной точки x=(a+b)/2. Если F1 < F2, то:
Найти решение задачи f(x)=(x1-2)4+(x1+2x2)2 → min, x(0)=(0,3)T методом Коши.
Пусть функция вогнута (выпукла), т.е. ее первая производная монотонна. Если в точке x' функция F(x) имеет минимум, и F'(x) является возрастающей функцией, то F'(x) в окрестности x':
Множество точек S1(x1,...,xn) функции f(x) называется множеством стационарных точек, если они удовлетворяют условию:
Пусть f(x) – строго квазивыпуклая функция. Рассмотрим задачу минимизации f(x) при условии, что x є R, где R – непустое выпуклое множество в Е(n). Если некоторая точка x' является точкой глобального минимума рассматриваемой задачи, то x' одновременно является:
Функция f(x) достигает глобального (абсолютного) максимума в точке x0, если для всех точек x є R справедливо:
Если вторая производная функции у = f(х) в данном промежутке положительна, то кривая...?
Пусть известен некоторый сопряженный базис , которому соответствует псевдоплан x. Базисные компоненты псевдоплана удовлетворяют условиям xi = xi0≥0 для всех i є Iδ. При этом псевдоплан x является оптимальным решением. Тогда справедливы соотношения:
Рассмотрим задачу нелинейного программирования: минимизировать f(x) при . Для входящего вектора справедливы следующие условия: или для всех x є S.Тогда скаляры {λi}, для которых справедливо соотношение Δf(x*)=Σλiηi(x) = -ΣλiΔgi(x*), i є I, являются:
Пусть задача линейного программирования имеет вид: максимизировать Σсixi, i=1,...,n при условиях a11x1 + a12x2+...+a1nxn ≤ b1 a21x1 + a22x2+...+a2nxn ≤ b2 (1) ......................... am1x1 + am2x2+...+amnxn ≤ bn, x1≥0,x1≥0,...,xn≥0.
Тогда допустимым множеством решений задачи называется:
Пусть уравнение определяет базисное решение . При этом Ar не входит в базис, т.е. справедливо равенство: A1x1r+A2x2r+...+Amxmr = Ar. Тогда базисное решение имеет вид:
Пусть уравнение определяет базисное решение . Обозначим решение уравнения A1x1+A2x2+...+Amxm+Arxr = А0 как . Тогда связь нового решения со старым базисным решением выражается следующими соотношениями:
Для табличного симплекс – метода в качестве начального базиса выбран базис из свободных переменных, для которых ci = 0. Соответствующее значение целевой функции определяется соотношением a00 = Σcixi = 0, i є I. Тогда оценки для всех небазисных переменных равны:
Если x0 и y0 – допустимые решения прямой и двойственной задач, т.е. Ax0≤b и ATy0≥c, то:
Если симплекс – метод не требует нахождения начального базисного решения (опорного плана), то он является:
Пусть задача линейного программирования задана в канонической форме: максимизировать L(x) = Σcjxj, j=1,...,n при условиях ΣAjxj = b, j=1,...,n, xj ≥ 0. Предположим, что n ≥ m и ранг матрицы A равен m. Тогда двойственная задача имеет вид:
Пусть f(x1,...,xn) дифференцируема в некоторой допустимой области R. Если для данной функции выполняется условие ∂f(x0)/∂xj = 0, j=1,...,n, то в некоторой внутренней точке области R функция:
Для того, чтобы в точке x0 достигался внутренний относительный минимум, достаточно, чтобы эта точка была стационарной, а сама функция в окрестности точки x0 была:
Если для пары векторов x*, Δ*, которая носит название седловой точки функции Лагранжа L(x,Δ), выполняется условие L(x*,Δ) ≤ L(x*,Δ*) ≤ L(x,Δ*), то оно справедливо:
Уравнение нахождения точки экстремума 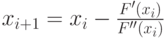 характерно для:
характерно для:
Пусть функция F(x) вогнута (выпукла), что соответствует монотонности ее первой производной. Если в точке экстремума x' функция F(x) имеет минимум, то производная F'(x) в окрестности x' меняет знак с отрицательного на положительный, т.е. F'(x) является возрастающей функцией, значит:
Пусть имеется начальный интервал (a; b), который имеет длину L = b – a. Согласно метода Фибоначчи интервал неопределенности имеет длину Ln = L1/Fn + ξ(Fn–2/Fn). Это значит, что:
В каком методе поиск состоит из последовательности шагов исследующего поиска вокруг базисной точки, за которой в случае успеха следует поиск по образцу.
Если при проверке сходимости а < σ, то это означает?
К чему сводит ме¬тод покоординатного спуска задачу поиска наименьшего значения функции нескольких переменных
Какие функции принято считать многоэкстремальными?
Метод Дэвидона-Флетчера-Пауэлла также называют
Какое из приведенных ниже соотношений характеризует выпуклую функцию f(x) на выпуклой области X:
Чему будет равен условный минимум x, при заданной функции f(x)=(x-4)2→min, с ограничением х≥4?
Пусть требуется изготовить 180 деталей. Их можно изготовить двумя технологическими способами: 1 способ: 4х1+х12, 2 способ: 8х2+х22. Затраты связаны функциональной зависимостью. Сколько изделий может быть изготовлено каждым способом?
Методы внешней точки генерируют последовательность точек, которые...?
Основная идея метода штрафной функции состоит в...?
Какой будет линия профиля при С = 0?
Если задача сформулирована в виде: максимизировать при условиях то это задача:
то это задача:
Чему будет равен условный минимум x, при заданной функции f(x)=(x-2)2→min, с ограничением х≥4?
Задача линейного программирования в канонической форме имеет вид: максимизировать L(x) = Σcjxj, j=1,...,n при условиях ΣAjxj = b, j=1,...,n, xj ≥ 0. Двойственная задача к ней задача записана так: минимизировать при условиях Тогда выполняется условие:
Если направление, противоположное направлению градиента, характеризуется наискорейшим убыванием функции, то направление градиента:
Пусть функция F(x) вогнута (выпукла), что соответствует монотонности ее первой производной. Известно, что если функция F(x) имеет локальный минимум (максимум) в точке x', то в этой точке градиент функции F(x):
Если оптимальное значение переменной прямой задачи равно нулю, то в оптимальном решении двойственной задачи ограничение j выполняется как:
Каноническая форма задачи линейного программирования имеет вид:
Задача линейного программирования сформулирована в матричной форме: максимизировать cTx при ограничениях Аx≤b; x≥0;. Тогда ограничения имеют вид:
Множество R(x) всех векторов x, которые удовлетворяют условиям: a11x1 + a12x2+...+a1nxn ≤ b1 a21x1 + a22x2+...+a2nxn ≤ b2 ......................... am1x1 + am2x2+...+amnxn ≤ bn, x1≥0,x1≥0,...,xn≥0,
является:
Новое базисное решение уравнения A1x1+A2x2+...+Amxm+Arxr = А0 имеет вид . При этом имеет место соотношение:  . Тогда новое решение:
. Тогда новое решение:
n – мерный вектор x, для которого xi=xi0 при i є Iδ, и xj=0 при i ∉ Iδ, и при этом выполняются условия: Δj ≥ 0, j=1,...,n;, называется:
Пусть в некоторой точке x0 достигается внутренний относительный минимум, и сама функция при этом в окрестности точки x0 строго выпукла. Тогда точка x0:
Чему будет равняться функция в точке образа, если базисная точка b1 = 2, а b2 = 5?
В чем состоит основная идея метода градиентного спуска?
Как называются функции с двумя и более локальными минимумами?
Пусть требуется изготовить 90 деталей. Их можно изготовить двумя технологическими способами: 1 способ: х1+3х12, 2 способ: 2х2+х22. Затраты связаны функциональной зависимостью. Сколько изделий может быть изготовлено каждым способом?
Что из ниже перечисленного является ограничением в виде равенства?
Если штраф создает барьер из больших значений Р вдоль границы допустимой области, эти методы называются...?
Квазиньютоновские методы обладают чертами метода Ньютона, но используют только ...?
С чем связана сходимость метода штрафных функций?
Если значения целевой функции прямой задачи никогда не превышают значений целевой функции двойственной задачи, т.е. cTx0≤bTy0, то допустимые решения прямой и двойственной задач имеют вид:
Задача линейного программирования сформулирована в каноническом виде:максимизировать . Тогда условия ограничения имеют вид:
Решение уравнения A1x1+A2x2+...+Amxm+Arxr = А0 имеет вид , и при этом выполняется соотношение . Выведем одну переменную xi из базисного решения, а соответствующий вектор из базиса. Новое решение имеет вид  . Данное решение:
. Данное решение:
Пусть дана прямая задача: максимизировать Σcjxj, j=1,...,n при ограничениях Σaijxj≤b, i=1,...,m, xj≥0, j=1,...,n. Если оптимальное значение соответствующей двойственной переменной равно нулю, то в оптимальном решении данной задачи i–е ограничение выполняется:
Двойственная задача линейного программирования имеет вид: минимизировать Σbiyi, i=1,...,m при условиях Σаijyi≥cj, j=1,...,n1≤n; Σаijyi=cj, j=n1+1, n1+2,...,n. Тогда прямая задача имеет вид:
Пусть функция f(x) определена на непустом и выпуклом множестве R. При этом для функции f(x) выполняется условие: для любых x1, x2 є R и λ є [0;1] f(λx1 + (1–λ)x1) ≤ max{f(x1),f(x2)}. Тогда функция f(x):
Пусть функция F(x) вогнута (выпукла), т.е. ее первая производная монотонна. Если в точке x' функция F(x) имеет максимум, и F'(x) является убывающей функцией, то F'(x) в окрестности x':
Чему будет равен условный минимум x, при заданной функции f(x)=(3-x)2→min, без ограничения?
Задана целевая функция Z=30x1+40x2 → max и ряд ограничений 12х1+4х2≤300, 4х1+4х2≤120, 3х1+12х2≤252, х1,х2≥0. Найти решение задачи.
Функция f(x) является строго квазивыпуклой, если для всех действительных x1, x2 таких, что f(x1) ≠ f(x2) и λ є (0;1) выполняется неравенство:
Если для табличного симплекс – метода в качестве начального базиса выбирают базис из свободных переменных, для которых ci = 0, и оценки для всех небазисных переменных равны Δj=a0j=-cj, то соответствующее значение целевой функции определяется соотношением:
Общая форма задачи линейного программирования имеет вид:
Задача линейного программирования имеет вид: максимизировать Σсixi, i=1,...,n. В векторной форме ограничения задачи имеют вид:
Если x0 и y0 допустимые решения прямой и двойственной задач и при этом x0 и y0 – оптимальные решения пары двойственных задач, то справедливо соотношение:
Предположим, что имеется интервал неопределенности (x1; x3) и известно значение f(x2) внутри этого интервала. Положим x2–x1 = L и x3–x2 = R, L > R. Если x4 находится в интервале (x1; x2) и новым интервалом неопределенности будет (x1; x2) длиной x2–x1 = L, то:
Согласно симплекс – метода, верное базисное решение при ограничениях задачи линейного программирования A1x1+A2x2+...+Anxn+An+1xn+1+...+An+mxn+m=A0 имеет вид:
Пусть задача нелинейного программирования задана следующим образом: минимизировать f(x) при условиях gi(x) ≤ 0, i = 1,...,m. Известно, что существует некоторый вектор Δ* ≥ 0, такой, что L(x*,Δ) ≤ L(x*,Δ*) ≤ L(x,Δ*) и . Функции gi(x) удовлетворяют условию регулярности Слейтера. Тогда:
Если существует такой небазисный вектор, для которого все элементы столбца неположительны, а целевая функция задачи в области допустимых решений неограниченна, то для такого вектора оценка:
Рассмотрим задачу нелинейного программирования: минимизировать f(x) при . Известно, что существует множество неотрицательных скаляров {λi} ≥ 0, для которых справедливо соотношение Δf(x*)=Σλiηi(x) = -ΣλiΔgi(x*), i є I. Тогда для входящего вектора справедливо условие:
Согласно какому методу после вычисления в начальной точке градиента функции делают в направлении антиградиента не маленький шаг, а движутся до тех пор, пока функция убывает?