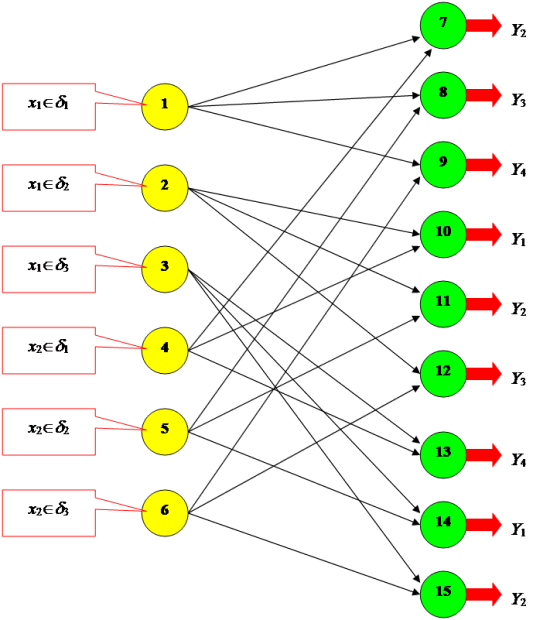
Рассчитайте значения возбуждения нейронов выходного слоя и найдите вектор управляющего воздействия по нечётко заданным характеристикам. Функция активации имеет вид:
 Vi := V, если V > h, 0 – в противном случае; h = 0,5.
Vi := V, если V > h, 0 – в противном случае; h = 0,5.
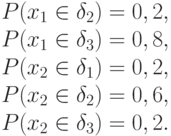
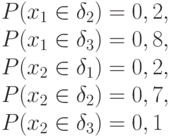
 Достоверность предположения о принадлежности значений x1 и x2 исследуемым интервалам равна:
Достоверность предположения о принадлежности значений x1 и x2 исследуемым интервалам равна: 
(Отметьте один правильный вариант ответа.)
Варианты ответа
y1 = 4, y2 = 5,6.
y1 = 4,2, y2 = 5,7.
y1 = 3,7, y2 = 5,4.(Верный ответ)



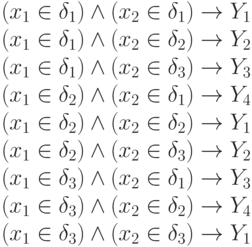
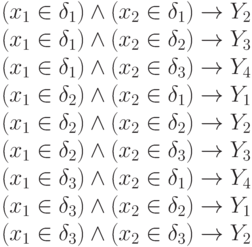
 . По данному логическому описанию системы управления составьте однослойную логическую нейронную сеть системы управления, используя принцип «размножения» решений.
. По данному логическому описанию системы управления составьте однослойную логическую нейронную сеть системы управления, используя принцип «размножения» решений.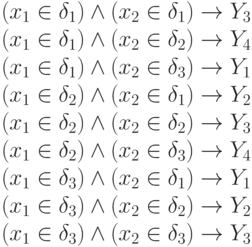
 ,
,  ;
;  .
.
 .
.