
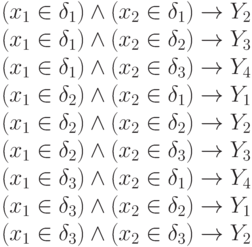
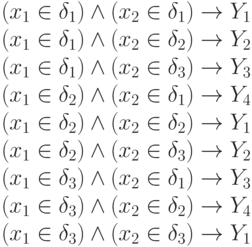
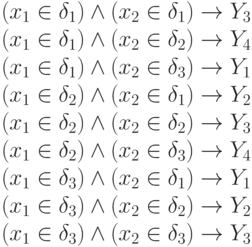
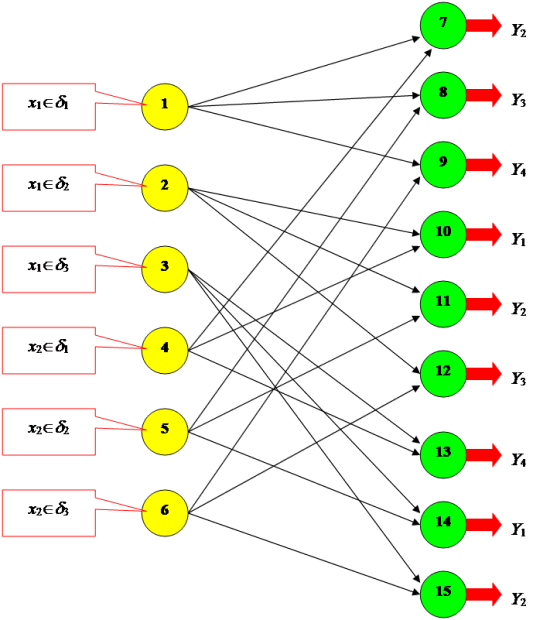
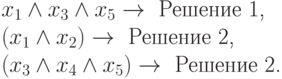
Диапазоны изменения измеряемых характеристик системы управления технологическим процессом разбиты на составляющие интервалы, определяемые требованиями по точности. Совокупность X = {x1, x2} измеренных значений, каждое из которых принадлежит некоторому интервалу, определяет вектор Y(y1, y2) необходимых управляющих воздействий, составляющих ограниченное множество векторов: Y1 = {5; 8}, Y2 = {3; 4}, Y3 = {6; 5}, Y4 = {1; 5}. Диапазон [0, 3] изменения переменных x1 и x2 разбит на три интервала  . По данному логическому описанию системы управления составьте однослойную логическую нейронную сеть системы управления, используя принцип «размножения» решений.
. По данному логическому описанию системы управления составьте однослойную логическую нейронную сеть системы управления, используя принцип «размножения» решений.
(Отметьте один правильный вариант ответа.)
Варианты ответа


 (Верный ответ)
(Верный ответ)


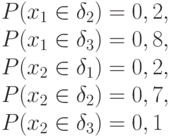

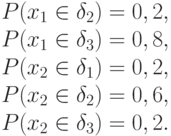
 Достоверность предположения о принадлежности значений
Достоверность предположения о принадлежности значений 
 ;
;  , 0 – в противном случае,
, 0 – в противном случае, 

 , если это значение не меньше порога
, если это значение не меньше порога  .
.
 , 0 – в противном случае,
, 0 – в противном случае, 