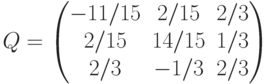
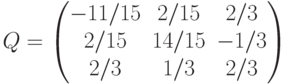
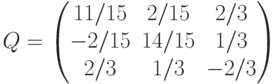
Чему равна обратная матрица  для матрицы
для матрицы  ,
,
(Отметьте один правильный вариант ответа.)
Варианты ответа
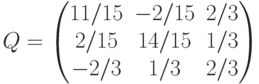
 (Верный ответ)
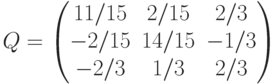
(Верный ответ)
 для матрицы ,
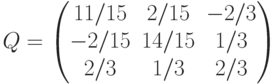
(Верный ответ)
для матрицы ,
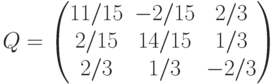
(Верный ответ)
 к базису
к базису  , базисы заданы своими координатами в линейном пространстве
, базисы заданы своими координатами в линейном пространстве  :
:
 ?
? к базису , базисы заданы своими координатами в линейном пространстве :?
к базису , базисы заданы своими координатами в линейном пространстве :?
 и
и  в каждом из базисов, базисы заданы своими координатами в линейном пространстве :?
в каждом из базисов, базисы заданы своими координатами в линейном пространстве :?
 в базисе , базисы заданы своими координатами в линейном пространстве :?
в базисе , базисы заданы своими координатами в линейном пространстве :?
 в компьютерной алгебре при условии, что Еk и El — единичные матрицы k-го и l-го порядков, В — произвольная k х l матрица?
в компьютерной алгебре при условии, что Еk и El — единичные матрицы k-го и l-го порядков, В — произвольная k х l матрица?
 , для которых выполняется равенство
, для которых выполняется равенство  , где
, где 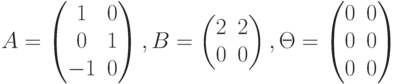 ?
?
 ?
из равенства
?
из равенства  , где
, где ?
от ортонормированного базиса
?
от ортонормированного базиса  в пространстве
в пространстве  геометрических векторов к базису
геометрических векторов к базису  , где векторы
, где векторы  получаются соответственно из векторов
получаются соответственно из векторов  и
и  поворотом их на угол
поворотом их на угол  в плоскости этих векторов?
от ортонормированного базиса в пространстве геометрических векторов к базису
в плоскости этих векторов?
от ортонормированного базиса в пространстве геометрических векторов к базису  , где векторы получаются соответственно из векторов и поворотом их на угол в плоскости этих векторов?
, где векторы получаются соответственно из векторов и поворотом их на угол в плоскости этих векторов?