
Пусть  – обучающая выборка, причем
– обучающая выборка, причем  . Указать правильную формулировку задачи нахождения оптимальной разделяющей гиперплоскости:
. Указать правильную формулировку задачи нахождения оптимальной разделяющей гиперплоскости:
(Отметьте один правильный вариант ответа.)
Варианты ответа
 при ограничениях
при ограничениях  при ограничениях
при ограничениях  при ограничениях
при ограничениях  при ограничениях
при ограничениях  (Верный ответ)
при ограничениях
(Верный ответ)
при ограничениях  при ограничениях
при ограничениях 

 Какое изображение получится в результате применения оператора Собеля с ядром
Какое изображение получится в результате применения оператора Собеля с ядром  ? Граница дополняется посредством дублирования.
? Граница дополняется посредством дублирования. Какое изображение получится в результате применения оператора Собеля с ядром
Какое изображение получится в результате применения оператора Собеля с ядром 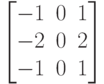 ? Граница дополняется посредством дублирования.
? Граница дополняется посредством дублирования. ?
? ?
? ?
? – матрица внутренних параметров камеры, R – матрица поворота объекта, T – вектор его параллельного переноса, то чему равна проекционная матрица P?
– матрица внутренних параметров камеры, R – матрица поворота объекта, T – вектор его параллельного переноса, то чему равна проекционная матрица P?  и нулевые коэффициенты дисторсии. Какой станет матрица внутренних параметров, если увеличить разрешение изображений до 640 x 480?
и нулевые коэффициенты дисторсии. Какой станет матрица внутренних параметров, если увеличить разрешение изображений до 640 x 480?